

Descrição: Equipamento eletrônico utilizado para variação de velocidade de motores de indução trifásicos.
Funcionamento: A variação da velocidade do motor ocorre através da variação da frequência e tensão de saída.
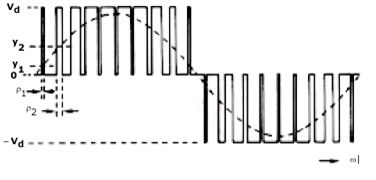
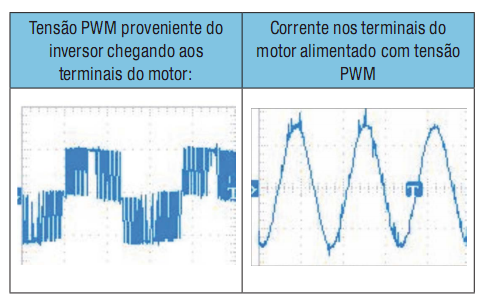
PWM: Técnica utilizada para efetuar a variação da tensão no motor, tendo como principal vantagem a eficiência. A imagem abaixo demostra sua forma de onda e corrente resultante.

Controle: Possui vários modos de controle, sendo os principais V/F, Quadrático e Vetorial.
V/F: Também chamado de controle Escalar, o mesmo forma uma curva constante de tensão x frequência, onde o motor atinge a máxima rotação (nominal) quanto a tensão e a frequência de saída do inversor são iguais a de placa do motor. Veja o gráfico a seguir.

Curva V/F (modo de controle Escalar)
Quadratico: Normalmente utilizado em controle de Bombas, Compressores e Ventiladores, onde o torque aumenta junto com a velocidade.
Vetorial sem Sensor: No modo de controle vetorial é adicionada a realimentação da corrente injetada no motor, sendo utilizada para corrigir a variação de velocidade e a perca de torque em velocidades baixas. Também chamado de SensorLess (quando não possui encoder de realimentação de velocidade).
Vetorial com sensor: No modo de controle vetorial com sensor, é instalado diretamente no eixo do motor um encoder incremental, que tem a função de informar ao inversor a velocidade real do motor, agindo como feedeback para a amlha de controle de velocidade. Algumas marcas utilizam encoder de seno e cosseno para dar maior precisão ao controle.
Algumas aplicações para Inversores de Frequência
Sincronismo com balancim: Utilizado quando se faz necessário o sincronismo da velocidade de dois motores e os dois estão ligados mecanicamente pelo processo. Ex.: Dois cilindros rotativos acionados independentemente por dois motores, tracionando um tecido para acabamento. Neste caso se o segundo motor tracionar o tecido mais que o outro, o tecido fica tencionado e pode romper, se o primeiro motor tracionar o tecido mais que o outro, o tecido fica frouxo, podendo enrolar no cilindro. Ver figura a baixo:

Sincronismo por balacim
Sincronismo por controle de torque: Usado em aplicações onde é necessário fazer sincronismo entre dois motores e não se pode ou não se deseja utilizar balacim e célula de carga. Neste tipo de aplicação o inversor recebe um sinal de externo ou interno de referência de torque, e então ajusta a velocidade do motor para que o torque desejado seja atingido.
Nesta aplicação a velocidade não é controlada, mas sim alterada para se atingir o torque desejado.
ServiceDrive | Manutenção Eletrônica Industrial