

Descrição: Equipamento eletrônico utilizado para controle de servomotores Brushless, executando funções como: Variação de velocidade, Posicionamento e controle de torque. Sendo empregado em máquinas que requerem alta precisão e dinâmica.

Funcionamento: A variação da velocidade do motor ocorre através da variação da frequência e tensão de saída, como em um inversor de frequência, a diferença está no motor, que possui imãs e no tipo de malha que é fechada através de um sensor de posição instalado no motor.
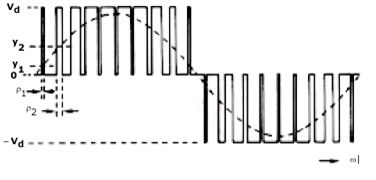
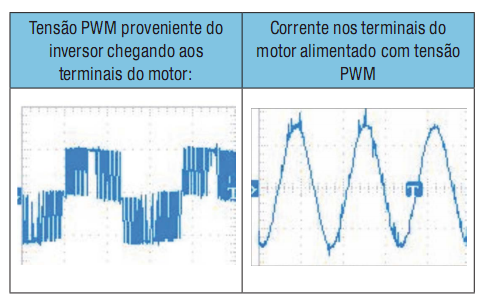
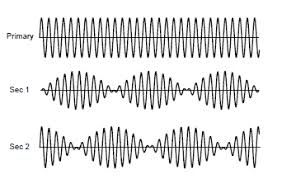
PWM: Técnica utilizada para efetuar a variação da tensão no motor, tendo como principal vantagem a eficiência. A imagem abaixo demostra sua forma de onda e corrente resultante.

Controle: Possui três tipos de controle, sendo: Controle de Velocidade, Controle de Posicionamento e Controle de Torque.
Sensor: Os sensores de ângulo utilizados nos servomotores são:
Encoder Incremental de 3 canais defasados 120° + canal A, B e Z de alta resolução.

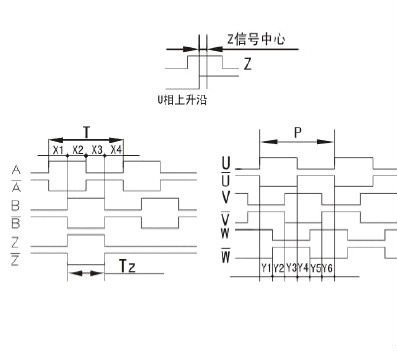
Encoder de Seno e Cosseno, gerando dois canais analógicos defasados 90° os quais retornam o ângulo exato e possui alta resolução.

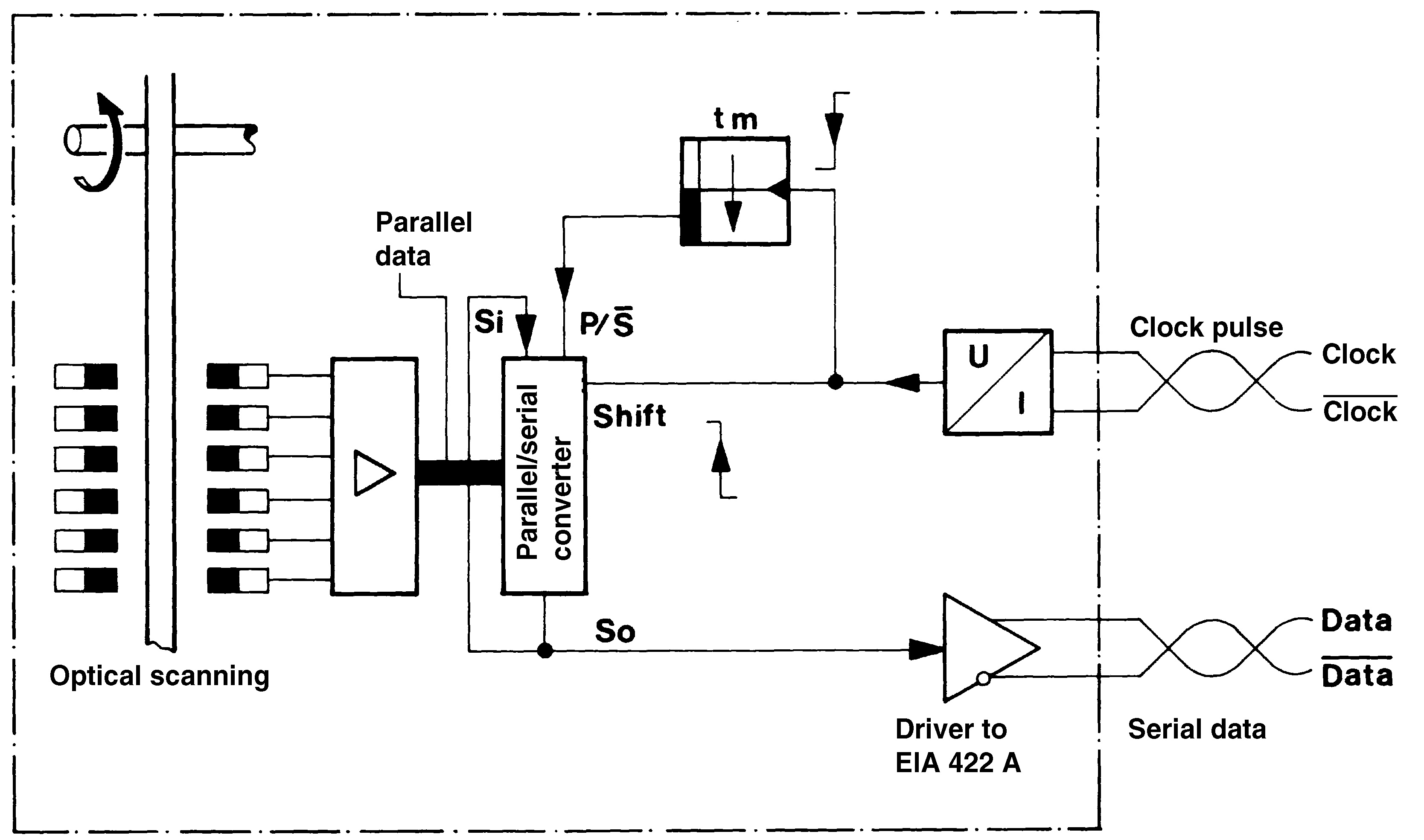
Encoder Serial, este possui comunicação serial, transmitindo a posição do motor e também informações de placa do motor ao ser energizado.
Resolver, consiste de um transformador rotativo, muito robusto e resistente, gerando dois canais de Seno e Cosseno analógicos transportados por uma portadora.

Velocidade: Consiste em controlar a velocidade do motor com uma alta precisão, executando rampas de acelerarão e desaceleração muito rápidas, com tempo de resposta muito alto e ótima dinâmica.
Posicionamento: Utilizado por exemplo em esteiras de transporte e outras aplicações onde seja necessário posicionar uma peça com uma alta precisão, por exemplo um servo WEG reparte uma rotação de 360° do motor em 16384 partes, sendo possível da um numero de voltas e frações de volta específico.
Torque: Utilizados em aplicações como as de máquinas de papel, onde não se pode utilizar balancim ou outro tipo de sensor que toque o material, sendo o sincronismo entre os motores realizados por controle do torque real no motor.
Algumas aplicações para Servodrive e Servomotor
Braços Robótico: Utilizados nos acionamentos dos eixos, informando a posição real das articulações, controlados pelo comando numérico.
Máquinas ferramentas: Utilizados para acionamentos dos eixos, sendo controlados pelo comando numérico, informado a posição real do eixo.
ServiceDrive| Manutenção Eletrônica Industrial